Festo tarafından geliştirilen BionicMobileAssistant, montajda ve tesis lojistiğinde otonom bir yardımcı olarak görev yapıyor.
Endüstriyel değişim; insanlar, makinalar ve veriler arasında yeni tür bir etkileşim gerektiriyor. Gelecekte operatörler ve robotlar çok daha yakın şekilde birlikte çalışacak.
Festo, bu nedenle, örneğin risk teşkil etmeksizin monoton veya tehlikeli faaliyetlerde çalışan insanları rahatlatacak sistemler üzerinde yoğun şekilde çalışıyor.
Yapay zeka burada merkezi bir rol oynuyor. BionicMobileAssistant, üç boyutta bağımsız olarak hareket eden ve nesneleri tanımlayabilen, uyarlanabilir şekilde tutabilen ve insanlarla birlikte çalışabilen bir robot sisteminin prototipidir.
ETH Zürih ile işbirliği içinde geliştirilmiş olan sistemin tamamı modüler tasarıma sahiptir ve üç alt sistemden oluşur: Hareketli bir robot, bir elektrikli robot kol ve BionicSoftHand 2.0. Festo tarafından ilk defa 2019’da tanıtılan pnömatik tutucu, insan elinden esinlenerek oluşturulmuştur.
BIONICSOFTHAND 2.0: İNSAN ELİNDEN ESİNLENDİ
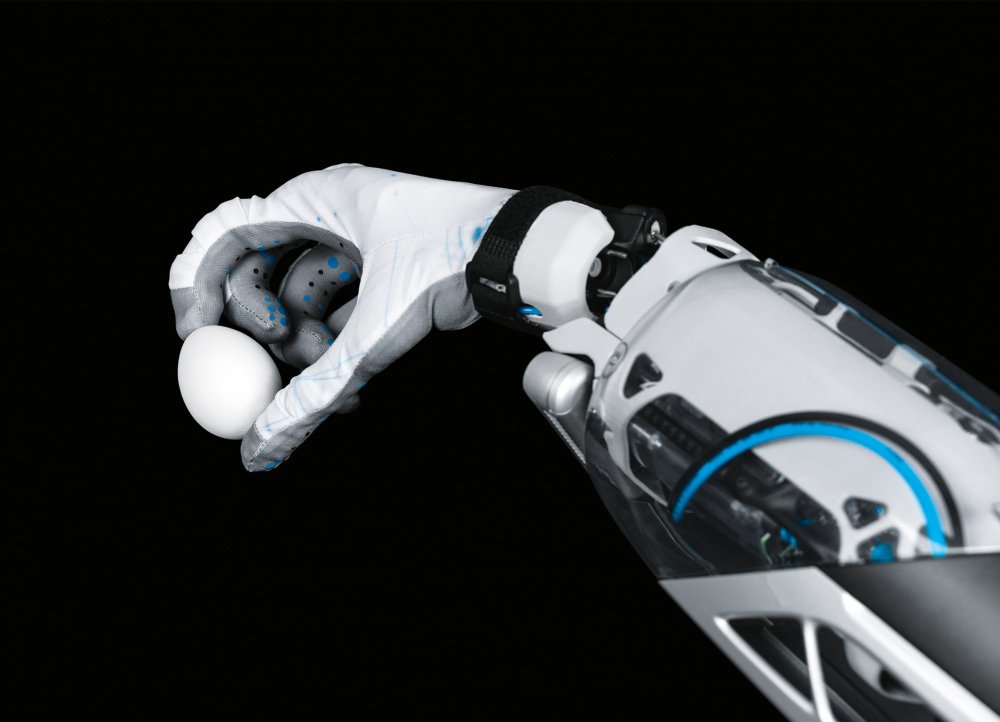
İnsan eli; eşsiz kuvvet, yetenek ve ince motor becerileriyle doğanın gerçek bir mucizesidir. BionicSoftHand 2.0’ın insan eli hareketlerini gerçekçi şekilde yapmasını mümkün kılmak için, kompakt valf teknolojisi, sensör teknolojisi, elektronik devreler ve mekanik komponentler oldukça küçük ve dar bir alanda entegre edilmiştir.
Parmaklar ve hareketli başparmak, sıkı fakat esnek bir örgü kumaşla çevrelenen hava haznelerine sahip esnek körük yapılarından oluşur. Bu, eli hafif, uyarlanabilir ve hassas yapmakla birlikte baskın kuvvetler uygulama yeteneği kazandırır. Pnömatik parmaklar, doğrudan el üzerine monte edilen piezo valflere sahip bir kompakt valf adası tarafından çalıştırılır.
OPTİMİZE EDİLMİŞ HAREKET YARIÇAPIYLA DAHA DA GELİŞTİRİLEN BIONICSOFTHAND
Geliştiriciler, baş ve işaret parmağının manevra kabiliyetini BionicSoftHand’in ilk sürümüne göre genişletmek amacıyla her iki parmağın yanal dönüş aralığını büyük ölçüde artırdı. Sonuçta bu iki parmak birlikte mükemmel çalışarak nesneleri büyük doğrulukla tutuyorlar.
3D yazıcıda yazdırılmış iki serbestlik dereceli bilek sayesinde, el hem ileri-geri hem de sola ve sağa doğru hareket edebilir. Yani, nesneleri dar bir yarıçapla tutmak da mümkündür.
HASSAS PARMAKLARA SAHİP TUTUCU
Parmakların dengesini artırmak için, şimdi hava haznelerinin her biri iki adet kemik görevi gören yapısal eleman içeriyor. Her bir parmak için, iki segmentli bir bükülme sensörü parmak uçlarının konumlarını tespit ediyor.
Ele aynı zamanda parmak uçlarında, avuç içinde ve robot elin dış kenarlarında dokunsal kuvvet sensörleri bulunan bir eldiven giydirilmiştir. Bu, elin tutulacak nesnenin yapısını algılamasını ve tutma kuvvetini bu nesneye göre ayarlamasını sağlar – tıpkı insanların yaptığı gibi.
SİNİR AĞI KULLANARAK NESNE ALGILAMA
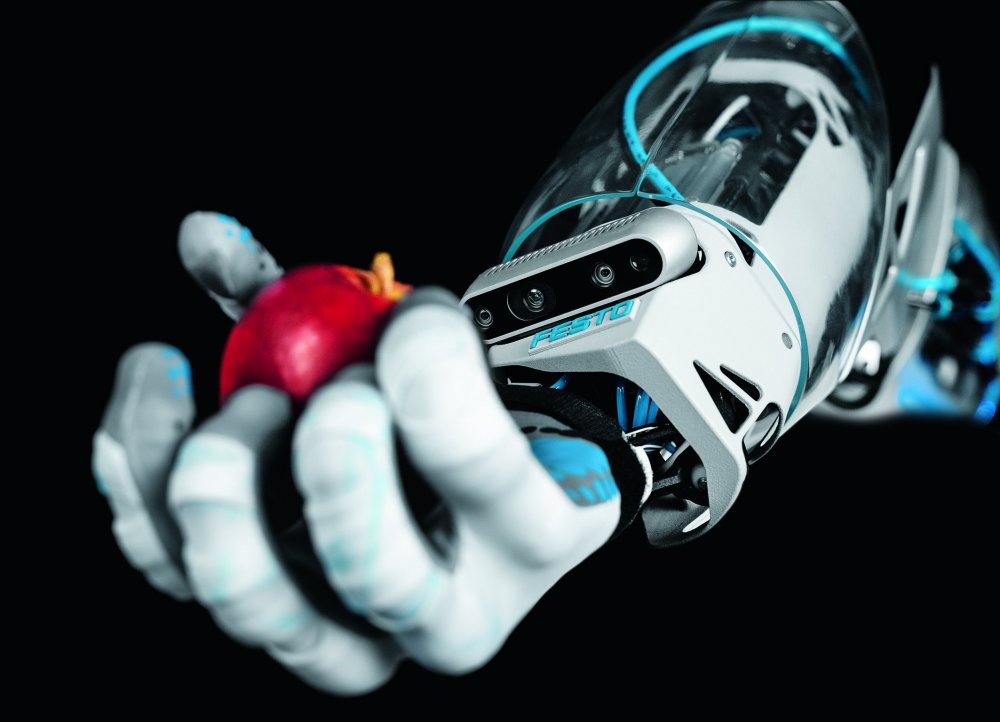
Dokunma sensörlerine ilaveten, el aynı zamanda nesneleri görsel olarak algılayabilmesi için bileğin iç tarafında bir derinlik kamerasına sahiptir. Robot el bu kamerayı kullanarak, kısmen kapatılmış bile olsalar bir dizi nesneyi algılayarak tutabilir.
El, doğru şekilde eğitildikten sonra, toplanan verileri nesneleri değerlendirmek ve örneğin iyiyi kötüden ayırmak için kullanabilir. Bu bilgi, veri artırma yardımıyla önceden eğitilmiş olan bir sinir ağı tarafından işlenir.

ELEKTRİKLİ KOLA SAHİP HAREKETLİ ROBOT UYGULAMASI
BionicSoftHand 2.0, bir top dengeleme robotu ile DynaArm olarak adlandırılan bir hafif elektrikli robot koldan oluşur.
DynaArm, sadece bir kilo ağırlığındaki yüksek derecede entegre sürücü modülleriyle gerçekleştirilen hafif tasarımı sayesinde hızlı ve dinamik hareketler yapabilir.
HAREKETLİ KULLANIM VE BAĞIMSIZ ENERJİ KAYNAĞI
Geliştiriciler, top dengeleme robotu için özel bir sürücü konsepti geliştirdi: Bir top üzerinde dengelenen robot. Yani, BionicMobileAssistant her yönde serbestçe hareket edebiliyor. Sistemin tüm enerji kaynağı kendi üzerinde: Kola ve robota enerji sağlayan pil gövdeye yerleştirildi ve pnömatik el için kullanılan basınçlı hava kartuşu üst kola monte edildi. Bu sayede robot hareketin yanısıra aynı zamanda bağımsız olarak çalışabiliyor.
Ana bilgisayara kaydedilen algoritmalar aynı zamanda sistemin otonom hareketlerini de kontrol ediyor. Robot, iki kamera kullanarak kendisini üç boyutta bağımsız olarak yönlendiriyor.
ÇOK ÇEŞİTLİ UYGULAMA SEÇENEKLERİ
Sistem, insanlar için doğrudan mükemmel bir yardımcı olarak kullanılabilir. Örneğin bir hizmet robotu, montajda bir yardımcı el olarak kullanılabileceği gibi ergonomik olarak yorucu veya monoton işlerin yapılmasında işçilere yardım etmek için kullanılabilir.
Ayrıca tehlikeli çalışma ortamı veya kısıtlı erişilebilirlik nedeniyle insanların çalışamadığı ortamlarda da kullanılabilir. Bu kullanım, bakım ve onarım işlerini, veri ölçümlerini veya görsel muayeneleri içerebilir. Aynı zamanda yüksek enfeksiyon riski olan veya enfeksiyon nedeniyle personelin giremediği bölgelerde en basit görevleri yapan robotlar tasavvur edilebilir.
Örneğin, gelecekteki olası bir senaryo, restoranlarda yiyecek ve içecekleri masaya getiren bir robot veya hastanedeki hastalara veya evlerinde bakım gerektiren yaşlılara ilaçlarını dağıtan bir robot olabilir.
İNSANLARLA EL ELE
Modüler konsept sayesinde, BionicSoftHand 2.0 aynı zamanda diğer robot kollara hızlıca monte edilebilir ve işletmeye alınması kolaydır. Tutucu, her ikisi de firmanın biyonik konseptleri olan BionicCobot veya BionicSoftArm ile birlikte, örneğin, doğasında olan esneklik ve uyum sayesinde insanlarla el ele çalışabilen tamamen pnömatik bir robot sistemi oluşturabilir.
SoftHand 2.0, tutulacak nesnenin yapısını algılayabilir ve tutma kuvvetini bu nesneye göre ayarlar – tıpkı insanların yaptığı gibi.
Nesnelerin görsel olarak algılanması için, bileğin iç tarafında bir derinlik kamerası vardır
Robot el, kamera görüntülerini kullanarak, örneğin yapraklarla çevrelenmiş bir elma gibi, kısmen kapatılmış bile olsalar bir dizi nesneyi algılayarak tutabilir.