Günümüzde robot programlama işlerinin büyük çoğunluğu elle (manuel veya çevrimiçi) yapılıyor. Uzun zamandır hayatımızda olan çevrimdışı -offline- programlama konusunda ise her gün yeni araçlar eklenmekte ve bu konuda hızlı bir değişim görüyoruz.
Üretim süreçlerine baktığımızda, değişik niteliklerde makine ve ekipman kullanıldığını ve mümkün olduğunca yeni teknolojilerin bu süreçlere uyarlandığını görmekteyiz. Örneğin CNC tezgahların, yüksek hassasiyetli işleme ve operator sayılarından tasarruf etmek için kullanılmakta. CNC tezgahları elle bir denetleyici yardımıyla programlanır ve her zaman o program yazan programcının takdir ettiği kadar hassas olabilir. Robot programlamada da benzer unsurlar bulunmaktadır.
Zaman içinde, CNC tezgahların programlanması bu tezgahların çalışabilmesi için gerekli G-kodları oluşturan çevrimdışı programlama yazılımları sayesinde daha verimli hale geldi. Bu sayede programcı bizzat tezgah başında olmadan gerekli G-kodları bir yazılım vasıtasıyla üretip , simüle etmekte ve onayladığı program ağ üzerinden CNC tezgaha ulaştırabilmekte. Bu da, doğruluğun artmasına, makine duruş süresinin azalmasına, daha karmaşık parçaların üretilmesine, yüksek karışımlı düşük hacimli üretim işlemlerinde karlılığa, insan hatalarının ortadan kaldırılmasına ve üretim maliyetlerinde genel düşüşe yol açıyor. Burada eğer bir robotlu otomatik yükleme-boşaltma otomasyonu yoksa operator sadece ilgili parçanın yüklenip boşaltılması için görev alacaktır.
Günümüzde elle CNC programlama, yalnızca yüksek hacimli üretim çalışmalarında çok temel işleri programlamak için kullanılıyor. CNC tezgahlarını programlamak için güçlü ve kullanımı kolay çevrimdışı yazılım kullanımı CNC dünyasında standart haline geldi.
Benzer şekilde de endüstriyel robotik uygulamalarında, robotları programlamak için 3 ana yol bulunmaktadır. Genel olarak bu konuda uzmanlaşmış insan kaynağına ihtiyaç duyan robot programlama, yazılım konusundaki gelişmelerle birlikte farklı yöntemlerle daha makul ve otomatik hale getirilebilmektedir. Bu yazımızda yeni teknolojileri kullanarak geliştirilen ve daha çok kullanım alanı bulacak 4. bir yoldan da bahsetmekte fayda görüyorum:
1. Çevrimiçi öğretme / Teach pendant programming
Bu programlama yöntemi, birincil öğretme metodu olup , öğretme kumanda paneli (teach pendant) kullanılarak programlanmanın yapılmasını içerir. Robotun hareketlerini programlamak için bu öğretme kumanda paneli kullanılır.

Robotu istediğiniz her konuma çok eksenli hareket sağlayabilen bir kumanda kolu (joystick) veya düğmelerle hareket ettirirsiniz ve ardından konumu programda bir nokta olarak kaydedersiniz. Çıktı, robot kolunun markaya özel programlama dilindeki bir programdır. Bu noktada diğer iletişimde olunan PLC, tezgah kumandası gibi paneller ile sinyaller vasıtasıyla bağlanılarak edilgen bir mekanizma olarak çalıştırılmasına olanak sağlar.
Avantajları:
• Geleneksel programlama yöntemi
• Robotla birlikte gelir, bu nedenle ek yatırım gerekmez
Dezavantajları:
• İnsan hatasına ve hatalı sonuçlara tabidir
• Robot, programlama sırasında üretimden alıkonulduğundan duruş süresini artırabilir
• Robotik ve programlama uzmanlığı gerektirir
• Her robot denetleyicisi farklı çalıştığından, her robot markası için bir öğrenme çabası gerektirir
2. Fiziksel (kinetik) Öğretme / Physical teaching
Bazı robotlar, robot manipülatörünü fiziksel olarak hareket ettirerek ve her konumu öğretme kumandasına kaydederek programlanabilir. Bu genellikle işbirlikçi robotlar (insanların yanında güvenli bir şekilde çalışmak üzere tasarlanmış robotlar- cobot ) için bir seçenek olarak günümüzde kullanılmaktadır.

Gelişmiş bir kontrol altyapısı gerektirdiği ve motorların robotu dengede tutarak insan yönlendirmesine açık olmasını ve istediği noktaya yaklaşık olarak götürmesine olanak sağlayıp, çok hassas konumlandırma gerektirmeyen yörünge öğretimlerinde kullanılabilmekte.
Avantajları:
• Çok sezgisel ve görsel yöntem
• Basit parça programlama için ideal
•Elle kumanda üzerinden programlamayı öğretmek kadar zaman alıcı ve sıkıcı değil
Dezavantajları:
• Hassasiyet eksikliği
• Tüm robotik uygulamalar için ideal değildir
• Karmaşık parçalar / programlama için zaman alıcı
• Robot, programlama sırasında üretimden alındığından duruş süresini artırabilir
• Çoğu endüstriyel robot için geçerli bir programlama yöntemi değil
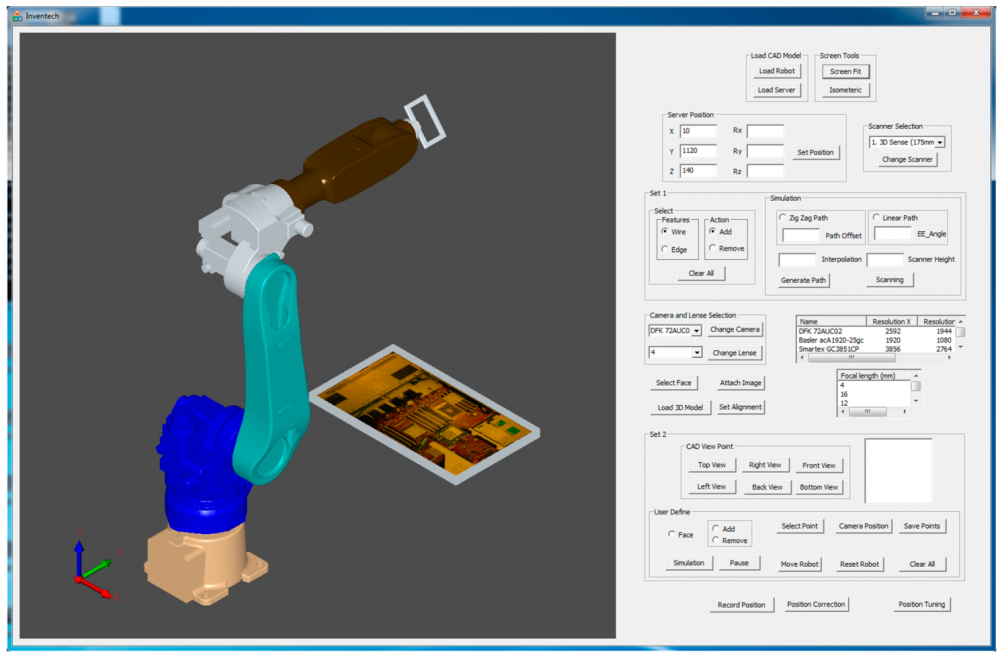
3. Çevrimdışı programlama yazılımları / Offline programming software
Endüstriyel robotları programlamak için oluşturulan en son teknoloji çevrimdışı programlama (OLP) yazılımıdır. Bir CNC makinesini programlamak için CNC yazılımını kullanmaya benzer şekilde, OLP yazılımı endüstriyel robot kollarını programlamak için ideal programlama yöntemidir.

Nasıl çalışır? Çevrimdışı programlama yazılımı, kullanıcının robotu üretimden uzaklaştırmak yerine, donanımdan bağımsız olarak bir bilgisayarda programlamasını sağlar. Yazılım, parçanın ve hücreyi oluşturan ekipmanların CAD modelini içe aktararak, yol yörüngelerini otomatik olarak oluşturabilir ve programı birkaç dakika içinde oluşturabilir. OLP yazılımı ayrıca, oluşturulan programın hatasız ve çarpışmasız olmasını sağlamak için gerçek dünyadaki robot hücresiyle eşleşen sanal/simülasyon ortamı aracılığıyla program optimizasyonu ve doğrulama sağlar.
Avantajları:
• Güçlü ve kullanımı basit, hızlı program oluşturma
• Tüm robot markaları için tek bir yazılım çözümü sağlayarak markadan bağımsız olabilir
• Yüksek düzeyde doğruluk elde edilebilir
• Programlama veya robotik uzmanlığı gerekmez
• Robot duruş süresinin azaltılması ve üretim süresinin artması
Dezavantajları:
• Güçlü çevrimdışı programlama yazılımı ek bir maliyettir
• Çevrimdışı yörüngelerin bir robot programcısı tarafından robota göre uyarlanması ve yörüngelerin mevcut yerleşime göre uyarlanması gereklidir.
4. Otonom programlama / Autonomous Programming
Günümüzde gelişen görme sensörleri ve kameralar sayesinde cisimlerin konumlarının yanısıra , duruş ve uzaydaki konumları belirlenebilmektedir. Cisim oryantasyonlarının belirlenerek otomasyon sistemi dahilinde robotlar tarafından tutulması veya bir noktadan başka bir noktaya taşınması yapılabilmektedir. Bunun için çevrimiçi veya çevrimdışı bir şekilde yazılmış programdaki referans noktalarını görme sistem veya sensörlerinden gelen bilgiye göre konumlandırılarak bu programın çalıştırılması esasına dayanmaktadır.
Görme ve yapay zeka birleştirilerek herhangi bir çevrimiçi veya çevrimdışı program olmaksızın robotun çalıştırılması esasına dayanan bir programlama üzerinde çalışılmaktadır. Bu çalışmada, robotun önüne konan cismin malzeme ve konumu algılanmakta, yapılacak işlem tarif edilmekte ve buna göre de bir yörünge hazırlanıp robotun çalıştırabileceği bir program haline getirmektedir.
Özetle bir OLP yazılımı ve görme sensörünün entegre edilmiş şekilde çalıştığı, arka planda da yapay zeka destekli bir programlama tipi olarak tanımlanabilecek bu yeni programlama yönteminde, malzeme tipinden, malzemenin nasıl birleştirileceği veya temizleneceğine kadar arka planda desteği sağlayan kuvvetli bir yazılım altyapısı bulunmaktadır.
Gelecek için büyük potansiyel taşıyan ve operatörden bağımsız kendisine verilen görevleri (parça kaynat!, parçayı taşla! veya paleti boşalt! gibi) kendi yapay zekası sayesinde değerlendirip çalıştırılabilecek bir program haline getirmesinin ilk adımı olarak değerlendirilmelidir. Bu biraz daha sübjektif gözükse de tekil işlerin robota nasıl yapılacağının adım adım tarifinden, artık sadece işin tanımlanmasına doğru gidilmesine doğru atılan bir adımdır.
Avantajları:
• Basit, hızlı program oluşturma
• Benzer algoritmalar her türlü robot markasında küçük uyarlamalar ile kullanılabilir hale getirilebilir
• Yüksek düzeyde doğruluk elde edilebilir
• Hiçbir uzmanlık gerekmez
Dezavantajları:
• Uygulama alanları şimdilik kısıtlıdır.
• Kamera ve algılama sisteminde hata olma ihtimaline karşı çevreye ve robota zarar verme ihtimali vardır.
Günümüzde endüstriyel otomasyon, imalat dünyasındaki en büyük trend. Daha yüksek doğrulukla ve çok kısa sürede daha fazlasını üretme vaadini sunuyor. Pandeminin neden olduğu tedarik zinciri kesintisi ve ciddi işgücü sıkıntısı, otomasyona doğru ilerlemeyi daha da hızlandırdı.
Robotlar otomasyonun en önemli anahtarlarından. Basit "seç ve yerleştir" uygulamalarından kesme, cilalama veya 3D baskı gibi karmaşık 3D üretim süreçlerine kadar geniş bir uygulama yelpazesinde kullanılmaktadırlar. Ayrıca, giderek artan sayıda üretim tesisi, birçok farklı parçadan oluşan düşük hacimli partiler üretiyor. Bu karşıt ihtiyaçlar artık el emeği üretim ile karşılanamaz. Tesisinizdeki robotların tüm potansiyelini yalnızca iyi bir çevrimdışı programlama yazılımı ve bir adım ötesinde kendi kararlarını verebilen otonom robot hücrelerinin kullanılması ile azami seviyelere çıkarılabilir.
Yazılımın CNC gibi atanmış tezgahların programlamasında oyunun kurallarını değiştiren bir bileşen olduğu kanıtlanmıştı ve aynısı şimdi dijital dönüşümün en önemli aktörleri olan endüstriyel robotlar ve cobotlar dünyasında da yaşanacak . Bir sonraki adım, uzmanlara gerek kalmaksızın işletmelerin kendi robot hücrelerinin üretimde yol almasını sağlamak ve istedikleri zaman kapasitelerini ayarlayabilecekleri iş modellerine göre yatırımlarını yönlendirmeleri olacak.