Tara Robotik Otomasyon firmasından Faris Bin Sajjad, robotik otomasyon sistemlerinin tasarlanmasında jeneratif dizayn yaklaşımını ve tutucuların önemini anlatıyor.
Endüstri 4.0, yeni teknolojilerin potansiyellerinin dijitalleştirilmesi yoluyla endüstriyel üretimin dönüşümüne yönelik stratejik bir girişimdir. Bu kapsamda, günümüzdeki endüstrisinde en yaygın kullanılan potansiyel teknolojilerden biri robot kollarıdır. Üretkenliği, maliyet tasarrufu sağlamak, ürün kalitesini artırmak ve tehlikeli/hoş olmayan ortamlarda çalışabilmeleri özelliklerinden dolayı robot kolları endüstride tercih edilmektedirler.
Robot kolların belirlenen işleri (paletleme, montaj, yapıştırma, parlatma, yüzey işleme gibi prosesleri) gerçekleştirebilmeleri için uçlarında özel olarak tasarlanmış bir tutucuya ihtiyacı vardır.
Tutucular, her ihtiyaca göre özel olarak tasarlanır. Bu ihtiyaç müşteri tarafından belirlenir ve sonra tasarım mühendisi müşterinin gereksinimlerini karşılamak ve ekonomik olacak bir yapı oluşturmak için hayal gücünü, bilimsel prensipleri ve mühendislik tekniklerini kullanarak, belli bir süreç sonrası bir tasarım ortaya koyar.
Bu tasarımı ortaya koyarken tasarım mühendisin dikkat etmesi gereken en önemli unsurlardan biri, tutucu ağırlığının çok optimum bir şekilde belirlenmesi dolayısıyla boş yere robot kollarının taşıma ağırlığını işgal etmesine izin vermemesidir. Bu çalışmanın amacı, paletleme robot kolların, tutucu tasarımlarının sürecinde geleneksel tasarım yöntemlerinden farklı olarak ve birden fazla çok farklı kriterlere uygun tasarım seçeneği ortaya koyan yapay zeka destekli, yenilikçi ve keşfedici tasarım uygulamalarını kullanarak bir tasarım geliştirmektir.
Böyle yazılımlar sayesinde tasarım mühendisi, her amaca uygun yeni bir tutucu tasarımı geliştirirken geleneksel tasarım sürecinden farklı olarak sadece tasarım parametrelerini (malzeme, boyut, ağırlık, güç, üretim yöntemleri ve maliyet kısıtlamaları gibi) tasarım yazılımına girer ve yazılım, hızlı bir şekilde yüzlerce hatta binlerce tasarım seçeneği oluşturarak olası tüm çözüm kombinasyonlarını araştırır ve ortaya koyar. Tasarım mühendisi oradan, ihtiyacını en iyi şekilde karşılamak için sonuçları filtreleyebilir ve seçim yapabilir.
Aynı zamanda, mekanik modellerine göre özel çalışma aralığına ve taşıma yüklerine sahip robot kolların tutucu ağırlığını en optimum biçimde belirlemiş olmak, robotların seçiminde gereksiz maliyetlere neden olacak gereksiz taşıma kapasitelerin hesaba katılmasını ortadan kaldırmış olmak demektir.
1. GİRİŞ
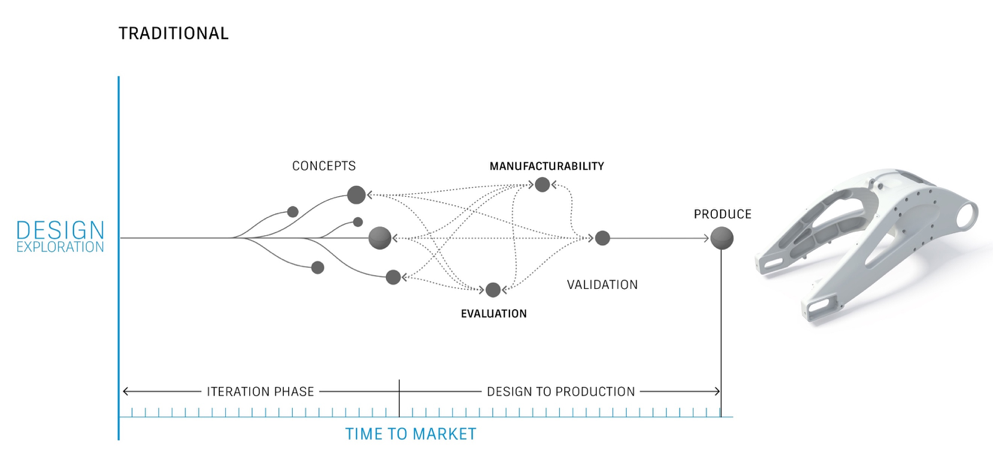
İnsan emeği ile yapılan işlerin, bilgisayarlar, mekanik aletler ve kendi kendine çalışan makineler ile yapılmasına otomasyon sistemi denir. Otomasyon sistemleri, her zaman müşteriye özel bir ihtiyacı karşılamak için ihtiyaç belirleme, projelendirme, tasarım, kurulum ve devreye alma gibi süreçlerden geçerek sıfırdan tasarlanırlar. Genelde gerçekleştirme süreleri kısa olan bu otomasyon sistemlerin tam çözüme kavuşturulması için hızlı bir şekilde yapılması gerekir. Dolayısıyla bu süreç içerisinde en uzun olan tasarım sürecinin hızlandırılması adına geleneksel tasarımdan farklı olarak yapay zeka destekli, yenilikçi ve keşfedici jeneratif tasarım yaklaşımına başvurulur. Geleneksel tasarım süreci içerisinde mekanik parça, düşünceden üretime olan bir süreç yaşamaktadır. Bu süreçte mekanik parçanın ne tür bir ihtiyacı karşılayacağı, bu ihtiyacın hangi koşullarda gerçekleştirileceği, ona göre hangi malzemeden imal edileceği, hangi yöntemlerle üretileceği ve ne kadar maliyet oluşturacağı gibi kararların verilmesi gerekir. Bu sebeple geleneksel mekanik parçaların tasarımında şekil 1’de gösterildiği gibi tasarımcının ortaya koyduğu tasarım, istenilen malzeme türüne, yapılan analiz sonuçlarına ve üretim yöntemlerine göre değişebilmektedir. Dolayısıyla mekanik parçaların tasarımı ve üretim süreçleri zorlu olabilmektedir. Ayrıca CAD programlarında tasarlanan mekanik parçalar, tasarımcının ve kullanılan programın kabiliyetine bağlı olarak sınırlıdır.
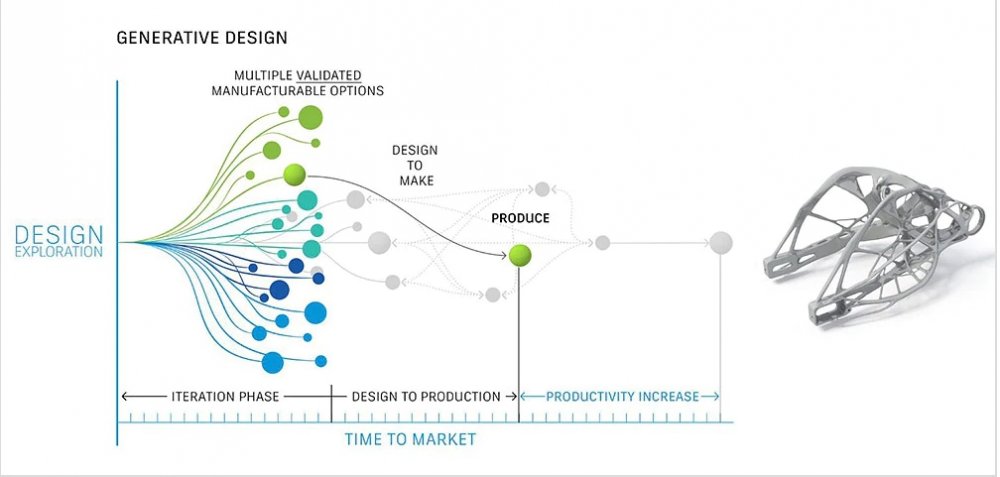
Geleneksel tasarım sürecinden farklı olarak yapay zeka destekli, yenilikçi ve keşfedici jeneratif tasarımı sürecinde sadece tasarım parametreleri (malzeme, boyut, ağırlık, güç, üretim yöntemleri ve maliyet kısıtlamaları gibi) tasarım yazılımlarına girilir ve yazılım, hızlı bir şekilde yüzlerce hatta binlerce tasarım seçeneği oluşturarak olası tüm çözüm kombinasyonlarını araştırıp ortaya koyar. Tasarımcı, tasarım için gerekli olan mekanik sınırlamalar ve yük koşullarına bağlı olarak değişik malzemeler denemek suretiyle istenilen mekanik dayanım ve üretim biçimlerine göre birçok tasarım örneği içerisinden seçme imkanı bulabilir, ihtiyaçlarını en iyi şekilde karşılamak için sonuçları filtreleyebilir ve seçebilir (şekil 2).
Bu çalışmada robot kolu flanşı ile gripper arasında ara parçanın tasarımı yapay zeka destekli, yenilikçi ve keşfedici tasarım uygulaması olan Autodesk Fusion 360 CAD yazılımı ile gerçekleştirildi. Tutucuların ağırlıklarını en optimum biçimde belirlemiş olmak, robotların seçiminde gereksiz maliyetlere neden olacak gereksiz taşıma kapasitelerinin hesaba katılmasını ortadan kaldırılmış olması demektir.
2. MATERYAL VE METOT
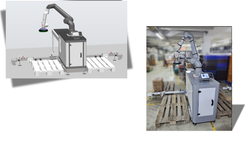
Endüstri 4.0 girişimleri kapsamındaki otomasyon sistemlerinde robot kolları, otomasyonlu imalat sistemlerinin ayrılmaz bir parçası olmaktadır. Bir robotun mekaniği, robota baktığımızda görebildiğiniz vücut kısmıdır ve erişim ve taşıma kapasitesine göre farklı büyüklüklere sahiptir. Bu mekanikte değişmeyen iki ana faktör “Base” ve “Flanş”tır. Base ile robot tabana sabitlenir ve flanş ile tutucu robota monte edilir. Robot kolların belirlenen işleri (paletleme, montaj, yapıştırma, parlatma, yüzey işleme gibi prosesleri) gerçekleştirebilmeleri için uçlarında özel olarak tasarlanmış bir tutucuya ihtiyacı vardır. Tutucular her ihtiyaca göre özel olarak tasarlanır. Tutucunun, robotun flanşı ile montaj yapılması için bir ara parça bulunur ve bütün ağırlığı bu ara parça üzerinden taşınır (şekil 3-b).
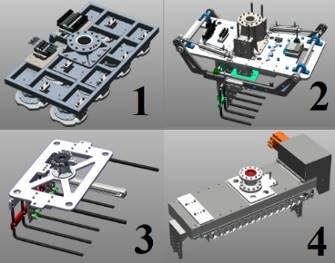
1) Damacana Tutucu
2) Koli Tutucu
3) Tava Tutucu
4) Radyatör Tutucu
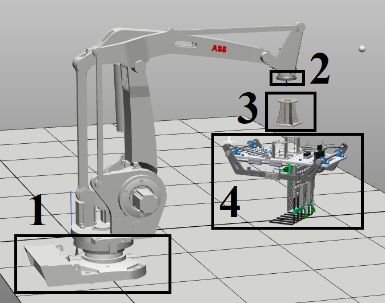
1) Base
2) Flanş
3) Robot-Tutucu Ara Eleman
4) Tutucu
Bu çalışmada ara parçanın tasarımı yapay zeka destekli, yenilikçi ve keşfedici tasarım uygulaması olan Autodesk Fusion 360 CAD yazılımı ile gerçekleştirildi. Autodesk Fusion 360, yeni nesil bulut tabanlı 3D tasarım, mühendislik ve imalat yazılımıdır. Katı, serbest ve doğrudan modelleme, montaj, teknik çizim, yapısal analizler, topoloji optimizasyonu, 3 ve 5-eksen CAM, görselleştirme, animasyon ve elektronik devre tasarımı gibi farklı araçları kullanıcı dostu bir platformda bir arada sunmaktadır.
3. BULGULAR VE TARTIŞMALAR
Geleneksel tasarımdan farklı olarak yapay zeka destekli jeneratif dizayn ile yapılan tasarım sürecinde birden çok fazla ve farklı sonuçlar bulundu. Bu elde edilen sonuçlar geometrinin tarifi, yükleme ve sınır koşulları, farklı malzeme türleri ve üretim çeşitliliğine bağlı olarak tamamen program tarafından bulundu (Şekil 4). Elde edilen sonuçlar, klasik tasarımcının modellenmesinde farklı olarak doğayı taklit eder niteliktedir.

Oluşturulan bu modeller kullanıcının taleplerine uygun olarak hazırlanan modellerdir. Bu modeller üzerinden uygun kıstaslar ile filtreleme ve gözlem ile kullanıcının uygun modeli keşfetmesi sağlanır. Bu modelde bizim kriterimiz hafif ve dayanıklı olması yönünde bir tercihimizi ortaya koyarak uygun modelleri filtreleme ile Fusion 360 programı üzerinden araştırma yapmamız mümkün kılmaktadır. Şekil 5’de oluşturulan modellerin güvenlik faktörü ve kütlesine göre grafik üzerine yerleştirilmesi sağlandı. Bu grafikte aradığı dayanım ve hafiflik kriterlerine göre seçim yaparak uygun modelin karşılaştırılması mümkün olabilmektedir.
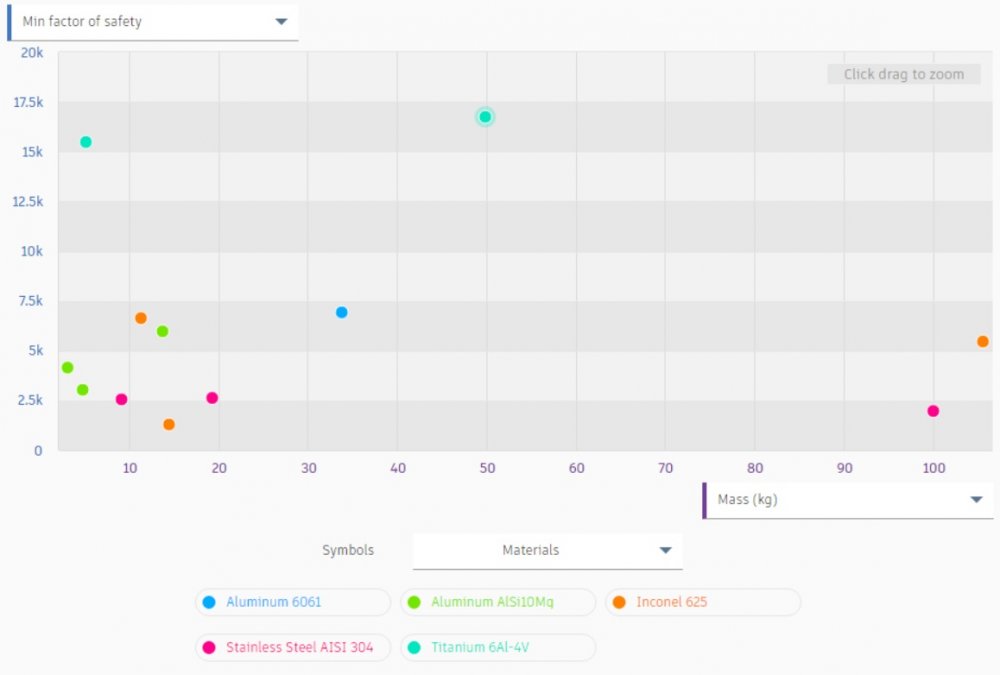
Şekil 5 grafiğinde yüksek dayanım ve hafiflik konusunda iki tasarım ürünün seçilerek karşılaştırılmasının sağlanması tasarımcının daha anlamlı ve kolay karar vermesini sağlar. Tasarımcı bu modelleri görsel yönden, fiziksel büyüklüleri, mekanik dayanım değerleri ve üretim maliyetleri gibi program tarafından sunulan özellikler içerisinden en uygun modeli keşfederek seçmesini sağlar.
4. SONUÇ
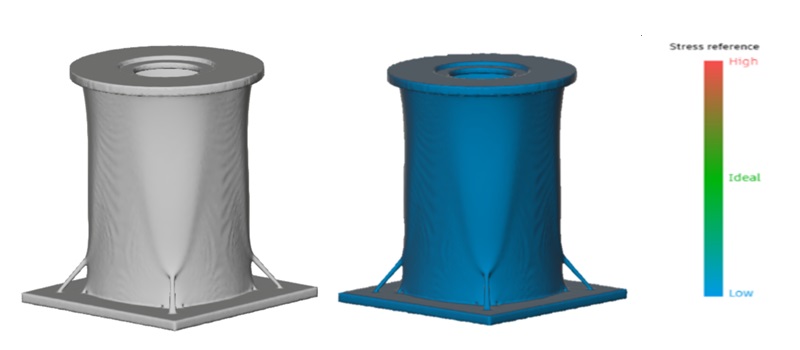
Yapılan bu çalışma ile tutucu ve robot arasından bağlantı sağlayan ara parçanın yapay zeka destekli tasarım olan jeneratif dizayn ile modellenmesini sağlandı. Bu şekilde ortaya çıkan bu model ile istenilen şartlarda, istenilen mekanik dayanımları sağlayan ve hafif olmasını sağlayan bir modelin oluşturulması sağlandı (Şekil 6).
Modern mühendislik sistemlerinin geliştirilmesi, zaman içinde artan düzeyde karmaşıklık ve belirsizlik getirmiştir. Bu belirsizliklerin klasik yaklaşım ile çözümlenmesi çok zaman alabilmektedir. Yapay zeka teknolojisinin gelişimiyle tasarımcıların klasik tasarım sürecinden yenilikçi tasarım sürecine geçerek, doğanın tasarım konusundaki yaklaşımını taklit etmek için makina öğrenmesinden yararlanır.
Bu sayede tasarımcılar veya mühendisler, tasarım parametrelerini (malzeme, boyut, ağırlık, güç, üretim yöntemleri ve maliyet kısıtlamaları gibi) üretken tasarım yazılımına girerler ve yazılım, hızlı bir şekilde yüzlerce hatta binlerce tasarım seçeneği oluşturarak olası tüm çözüm kombinasyonlarını araştırır.