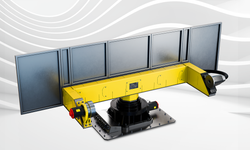
Pilz Türkiye Mühendislik Proje Yöneticisi Agit Çelikten, ürünün yeni geliştirilen versiyonu PSENradar Cat3 ile 6 sensörün gruplandırılması ve 4 bölgenin tanımlanmasıyla, birçok ölü bölgenin tek bir kontrol kartı ve sensörleri ile algılanabilmesine olanak tanıdıklarını belirtiyor.
Çelikten, “Robotik sistemlerin yaygınlaşmaya başladığı bugünlerde, bu çözüm mevcuttaki riske dair önemli bir yenilik getirecektir. Biz de PILZ olarak Türkiye’nin ana otomotiv imalatçılarından birinde bu konuya dair uygulamalar hayata geçiriyoruz.” diyor.
Robot ve makina emniyeti konusunda sunduğunuz ürün ve çözümler hakkında bilgi verebilir misiniz? Son dönemde bu doğrultuda ürün gamınızda yaşanan teknolojik gelişmeler ve yenilikler nelerdir?
Robot ve makina emniyeti konusunda sunduğumuz çözümlerden PSENradar, radar teknolojisine dayalı koruma bölgesini emniyetli olarak izleyen sensörü ve kontrol kartı ile çözüm sunan bir ürünümüzdür. Buradaki radar teknolojisinin temelini açıklamak gerekirse; 24 – 24,25 GHz dalga aralığında frekans modülasyonu sürekli dalga (FMCW) üreten sensörler ile birlikte algılama yapılır ve bir kontrol kartında emniyetli bir değerlendirme ve çıkış üretilir. Kontrol kartı 6 adede kadar radar sensör ile donatılabilir. Toza, yağmura, ışığa ve buhara duyarsız olan bu sensörler hareketleri algılamaktadır. Hareket algılayan bir teknolojiye sahip olan PSENradar statik durumdaki metale karşı duyarsızdır. Robotik hücrelerde her daim bir risk olan hücre içindeki operatörü algılayıp, sistemin çalışmasını engellemek için geliştirilmiştir. Yeni versiyonu geliştirilen PSENradar Cat3 emniyet bağlantı mimarisini desteklemekte ve performans seviye “D” seviyesinde emniyet sağlamaktadır. Ayrıca 6 sensör gruplandırılarak 4 bölge tanımlanabiliyor ki, böylece birçok ölü bölge tek bir kontrol kartı ve sensörleri ile algılanabilmesi sağlanıyor. Sistem çalışmaya başladıktan sonra gruplandırılmış sensörler susturulabiliyor. Robotik sistemlerin yaygınlaşmaya başladığı bugünlerde, bu çözüm mevcuttaki riske dair önemli bir yenilik getirecektir. Biz de PILZ olarak, Türkiye’nin ana otomotiv imalatçılarından birinde bu konuya dair uygulamalar hayata geçiriyoruz. Ürün olmamakla birlikte, bugünlerde üzerinde yoğunlaştığımız bir diğer hizmetimiz emniyet yazılım doğrulamasıdır. Bu hizmet çok niş bir amaca hizmet etmekte olup, detayları şu şekildedir. Emniyet kontrol ünitelerinin içerisinde bulunan yazılımın EN ISO 13849 ve IEC 61508 (Functional Safety of Electrical/Electronic/Programmable Electronic Safety-related Systems) standartları uyarınca kontrollerini yapıp, bir doğrulama raporu sunuyoruz. Bu raporla birlikte yazılımcılar dışında bir kara kutu olan emniyet yazılımın detaylarını ve uygunsuzluklarını ortaya çıkarmış oluyoruz. Eski bir yazılımcı olarak burada amacımız yazılımcı arkadaşlarımızı zor duruma sokmak değil, emniyetli bir yazılım ortaya çıktığını doğrulamaktır. Aynı zamanda ve yazılım disiplinine hakim olmayan kişiler içinde anlaşılabilir ve makinalarını veya hatlarını güvende hissederek çalıştırabilecekleri bir rapora sahip olacaklardır.
Robot popülasyonunun artmasıyla, endüstride yoğun olarak robotların kullanılmaya başlamasıyla birlikte emniyet konusu gündemin ilk sıralarında yer almaya başladı. Bu konudaki değerlendirmelerinizi alabilir miyiz?
İnsan kaynaklı hatalarda günümüzde geçmişe kıyasla bir düşüş söz konusun olmadığını, aksine bir artış söz konusu olduğunu belirtebilirim. Günümüzde, önceki yıllara nazaran, robot ve robotik sistemler daha uygun maliyetlerle tedarik edilebiliyor. Oluşabilecek tehlikeleri önlemek adına yapılması gereken, konvansiyonel ve/veya kolaboratif robotları sistemlerimize dahil ederken ya da robot içeren anahtar bir çözüm satın alırken ilgili standartları bilmemizdir. 6331 sayılı İş Sağlığı ve Güvenliği Kanunu’nda atıfta bulunulduğu üzere, bu standartları bilmek yetmez, aynı zamanda projelerde uygulamak veya uygulandığını denetlemekle de yükümlüyüz. 2006/42/AT Makine Emniyet Yönetmeliğinde “Makine” haricinde bir de “Kısmen Tamamlanmış Makine” tanımı bulunmaktadır. Yönetmelikte bu tanım “Başka bir makinaya veya kısmen tamamlanmış makinaya dahil edilerek, bu yönetmelik kapsamındaki bir makinayı oluşturması amaçlanan, sürücü sistemi gibi, hemen hemen makina durumunda olan, ancak kendi başına belirli bir uygulamayı gerçekleştiremeyen parçalar topluluğu” olarak ifade edilir. Bu tip makinalara verilebilecek en güzel örnek robotlardır. Kendi başına bir makina sayılabilecek robotlar endüstride hiçbir zaman tek başlarına çalışmazlar. Muhakkak yanlarında bir fikstür vb. ekipman ve uçlarında bir uç ekipmanı ile birlikte kullanılır. Bu durumdan dolayı her ne kadar çok bilindik ve çok güvenilir bir markanın, son derece üst seviyede emniyet sistemleri ile donatılmış bir robot modelini satın alsanız dahi bahsettiğim diğer etkenler robotu ve robot sistemini ayrıca bir risk değerlendirmesine tabi tutmak durumunda bırakır. Operasyon ancak bu risk değerlendirmesi sonucu alınacak tedbirler sonrasında emniyetli olarak kabul edilebilir.
Robotların ve makinaların oluşturduğu tehlikeler nelerdir? Robot hücreleri ve makinalar ile emniyetli bir uygulama yapılabilmesi için alınması gereken önlemler nelerdir?
Robotlar doğaları gereği hızlı ve kuvvetli cihazlardır. Sistemlerimize dahil ederken emniyet kriterlerini kesinlikle gözetmeliyiz. Amacı bir yerde operatörü tehlikeli ve ağır işten uzaklaştırmak olan bu cihazların sisteme dahil edildikten sonra yeni tehlikeler ortaya çıkarması yanlış bir metot ile çok olasıdır. Emniyetli bir uygulama yapmak için öncelikli olarak sorulması gereken soru sisteme entegre edilen robotlarda emniyet kartı veya ana kart üzerinde emniyet opsiyonu mevcut mudur? Devamında ise sorulması gereken soru sistemin tamamını kontrol edecek kontrol ünitesinde emniyet fonksiyonlarını denetleme kabiliyeti var mıdır veya ayrıca bir emniyet kontrol ünitesi mevcut mudur? Bu iki temel soru üzerine inşa edilecek olan emniyet mimarisi ile amaçlanan sisteminin giriş (algılama)-kontrol-çıkış (aktüatör) adımlarının emniyetli hale getirilmesidir. En temel çıkış elamanı olan robot kolu için doğru durdurma metodu ise emniyet kartı veya ana karta tanımlı emniyet opsiyonu üzerinden onu durdurmaktır. Bu opsiyonların veya kartların isimleri robot markasına göre değişiklik göstermektedir. Endüstride yaygınlaşan robot kullanımının oluşturduğu talep doğrultusunda önümüzdeki günlerde PILZ Türkiye bünyesinde hayata geçirilecek Sertifikalı Robot Emniyet Uzmanlığı eğitimi gerçekleştirmeyi planlamaktayız.

İnsan-robot iş birliği ve bu kapsamda güvenli çalışma noktasında öne çıkan kriterler nelerdir? PRMS çarpışma ölçüm setiniz ile ilgili bilgi verebilir misiniz?
Kolaboratif robotlar ve ekipmanları düşük kuvvet ve taşıma kapasitesine sahip insan-robot iş birliği için özel olarak imal edilmiş robotlardır. Konvansiyonel robotların aksine, üçüncü parti emniyet ürününe ihtiyaç duymayıp özel emniyet fonksiyonları ile donatılmış operatör ile birlikte çalışabilen bu robotlar için geçerli teknik doküman ISO/TS 15066 – Robot ve Robotik Cihazlar – Kolaboratif Robotlar dokümanıdır. Bu doküman, teknolojinin oldukça yeni olmasından kaynaklı olarak, henüz harmonize bir Avrupa standardı halini almış olmasa da bizlere kolaboratif robot uygulamalarında dikkat edilmesi gereken hususlar ile ilgili detaylı bilgiler içeren bir kılavuzdur. Tahmin edilebileceği üzere kolaboratif robot uygulamalarında en sık karşılaşılabilecek tehlike robotun birlikte çalıştığı kişiye çarpması veya onu sıkıştırmasıdır. ISO/TS 15066 bu gibi durumlar için iki adet tanım ortaya koyar; “quasi-static contact” ve “transient contact”. İlk terim operatörün vücudunun bir bölgesinin makinanın/çalışma bölgesinin sabit aksamı ile robot arasına sıkışması, ikinci terim ise robotun darbe etkisini tarif eder. ISO/TS 15066 bu tip sıkışma ve darbe durumlarında çalışan kişinin zarar görmemesi için vücudun farklı bölgelerine ait hız ve kuvvet sınırlarını tanımlar. Pilz olarak müşterilerimizin kolaboratif robotlu uygulamalarının ISO/TS 15066 gereksinimlerini karşılayıp karşılamadığını belirlemek için HRC Ölçüm hizmeti veriyoruz. Bu hizmet kapsamında danışmanlık ekibi üyelerimiz tarafından operasyon sırasında belirlenen sıkışma ve darbe noktalarında hız ve kuvvet ölçümleri yaparak müşterilerimize raporluyoruz. Böylece müşterilerimizin kolaboratif robot uygulamasının ISO/TS 15066 gereksinimlerine uyup uymadığını belgelemiş oluyoruz.