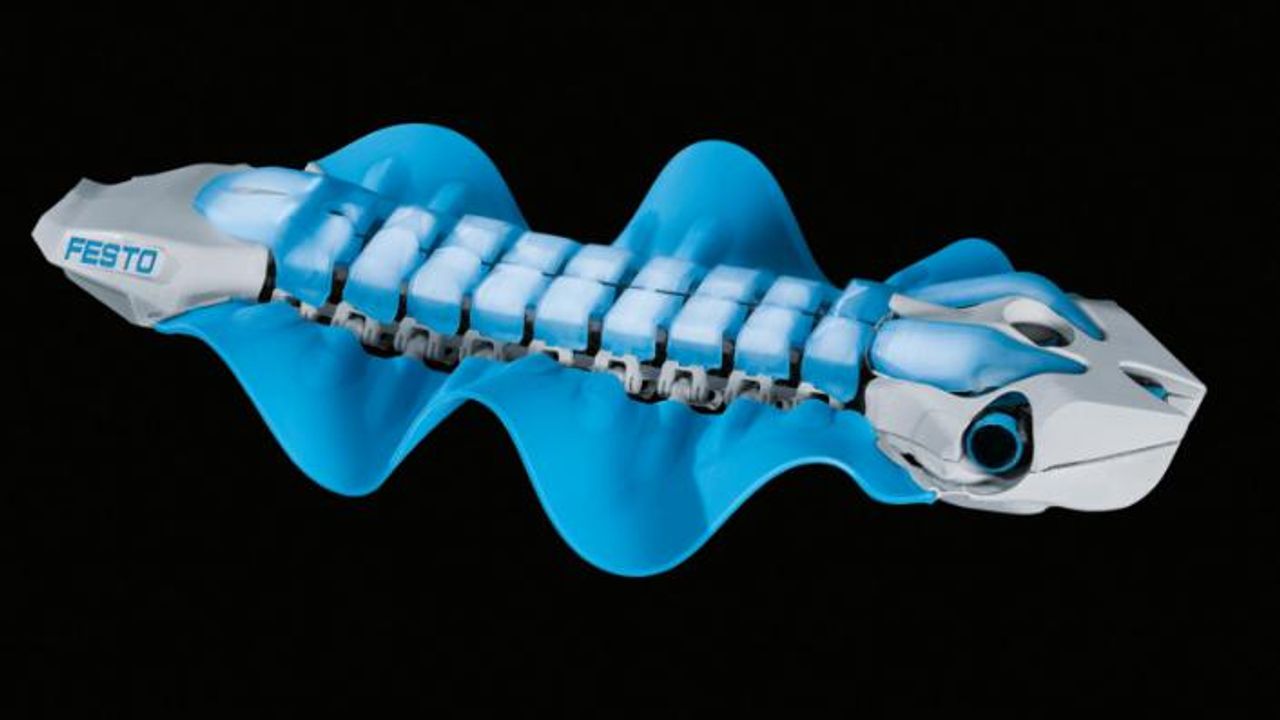
Doğa bize, sudaki belirli hareket tipleri için ideal tahrik sistemlerinin neye benzediğini etkileyici şekilde öğretiyor. Festo’nun ilk olarak Achema 2018’de tanıttığı BionicFinWave için, biyonik ekibi, polyclad veya mürekkep balığı gibi deniz hayvanlarının yaptığı dalgalı kanat hareketlerinden ilham aldı.
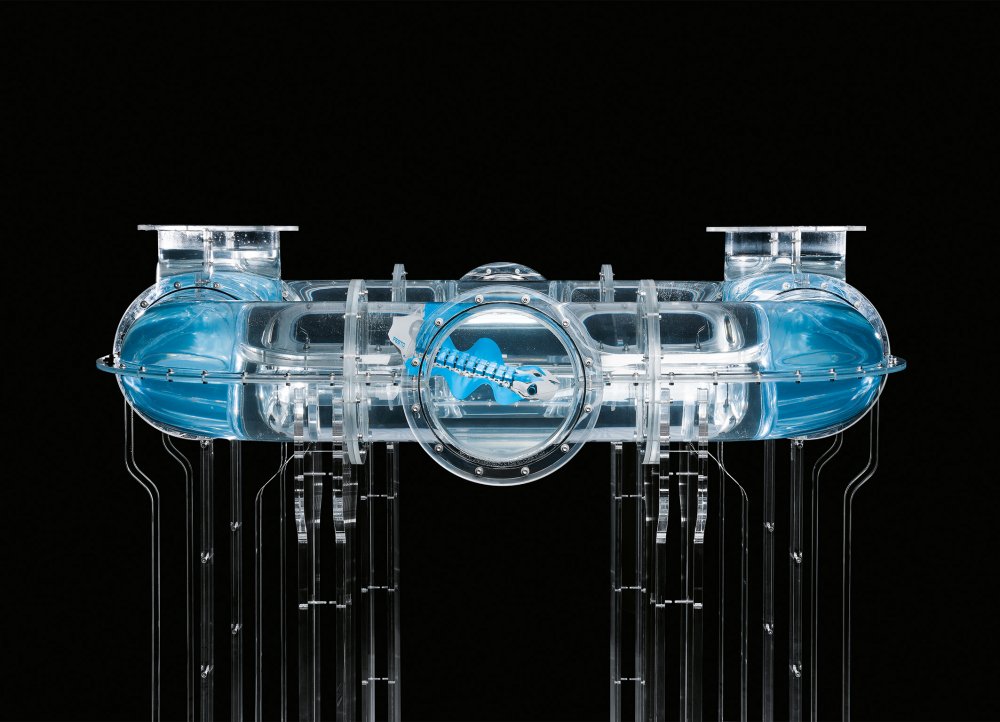
Bu itme şekliyle, sualtı robotu, bir akrilik cam hortum sistemi vasıtasıyla kendi manevralarını bağımsızca yapıyor. Bu proje, gelecekte proses endüstrisinde kendi kendini yöneten robotlarla çalışmak için motivasyon sağlıyor.
Festo, bu teknolojik ürün ile bir kez daha kendi kendini yöneten robotlarla ve sıvı ortamlarda kullanım için yeni tahrik teknolojileriyle geleceğin işi için motivasyon yaratıyor.
BionicFinWave gibi konseptler; muayene, ölçümler veya veri toplama gibi görevler için, örneğin, su ve atıksu teknolojisi veya proses endüstrisinin diğer alanları için daha fazla geliştirilebilir. Bu projede kazanılan bilgi, aynı zamanda yumuşak robotik komponentlerin üretim yöntemleri için de kullanılabilir.
DOĞAL MODELİ GİBİ YÜZME
Polyclad ve mürekkep balığının boylamasına kanatları, baştan kuyruğa kadar, sırtları, alt kısımları veya gövdelerinin iki tarafı boyunca uzanır. Hayvanlar, suda hareket etmek için kanatlarını kullanarak, kendi vücutlarının tüm uzunluğu boyunca ilerleyen sürekli bir dalga oluştururlar.
Bu dalgalanma, suya geriye doğru kuvvet uygulayarak ileriye doğru bir itme kuvveti üretir. BionicFinWave aynı zamanda bu prensibi ileriye veya geriye doğru kendi manevra hareketlerini yapmak için kullanır.
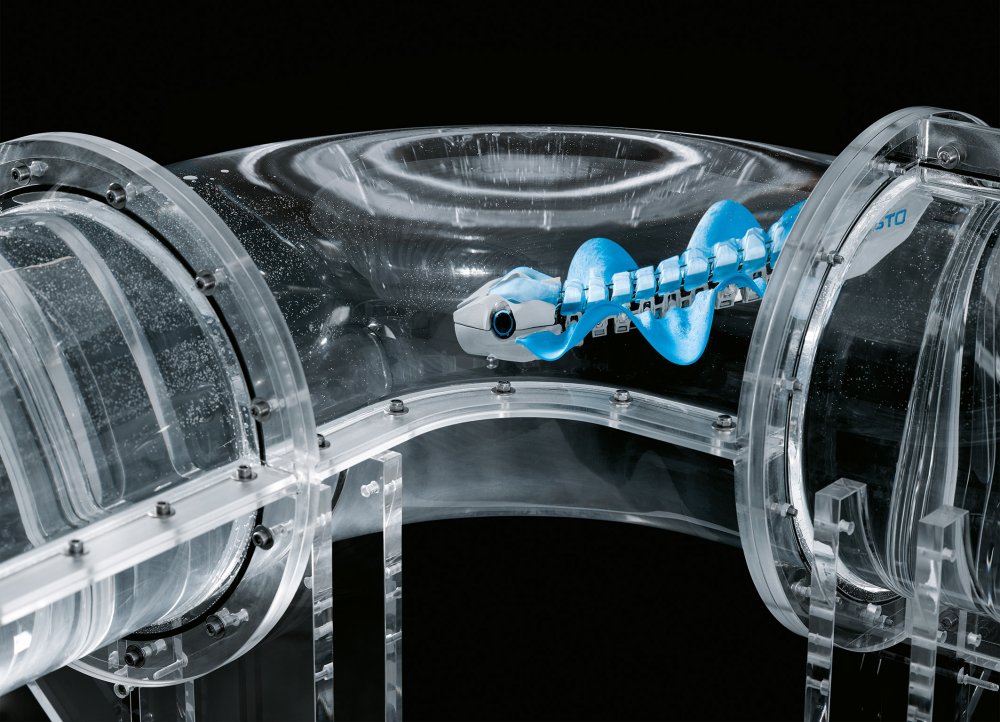
Festo bu robot ile, özellikle yavaş, hassas hareket için uygun olan ve suda örneğin geleneksel bir vida itici güç tahriğinden daha az türbülansa yol açan bir kanat tahrik ünitesi gerçekleştirmesini olanaklı kıldı.
Boru sistemi boyunca hareket ederken, otonom sualtı robotu radyo dalgaları yoluyla dış dünyayla haberleşebiliyor veya sıcaklık ve basınç sensörü okuma değerleri gibi verileri bir tablet bilgisayara gönderebiliyor.
ENTEGRE KOMPONENT OLARAK ESNEK SİLİKON KANATLAR
370 mm boyundaki BionicFinWave’in iki yanal kanadı tamamen silikon kalıp olup takviye payandalarla ve diğer destekleyici elemanlarla uygulanır.
Bu nedenle son derece esnektirler ve kendi biyolojik modellerinin nazik akıcı hareketlerini gerçekçi şekilde taklit edebilirler. Hareketi gerçekleştirmek için, iki kanattan her biri, 45 derece sapma açılı dokuz küçük manivela koluna bağlanır; bunlar sualtı robotunun gövdesi içine yerleştirilmiş iki servo motor tarafından kontrol edilir.

İki düz dirsekli mil, iki kanadın birbirinden bağımsız olarak hareket edebilmesi için kuvvetleri kollara iletir; bu şekilde, eş zamanlı olarak farklı dalga şekilleri üretebilirler. Örneğin bir kavis içerisinde yüzmek için, - bir ekskavatörün dişleriyle olduğu gibi - dış kanat iç kanattan daha hızlı hareket eder.
BionicFinWave, kendi gövdesini istediği yönde bükerek yukarıya veya aşağıya doğru hareket eder. Dirsekli milleri uygun şekilde esnek yapmak için, üniversal mafsallar levye segmentlerinin arasına yerleştirilir. Bağlantılarla ve piston miliyle dirsekli miller, bir 3D yazdırma işleminde entegre komponentler olarak plastikten yapılmıştır.
ENTEGRE YERLEŞİK ELEKTRONİK DEVRELERLE İDEAL TASARIMLI GÖVDE
BionicFinWave’in sadece 430 gr. gelen diğer gövde elemanları da 3D yazdırmayla yazdırılır; bu, karmaşık geometrinin gerçekleştirilmesini mümkün kılar.
Gövde elemanları, içlerindeki boşluklarla şamandıra görevi görürler. Aynı zamanda, su geçirmez boşluklar, çok küçük bir alan içerisinde tüm kontrol ve düzenleme teknolojisi için güvenli bir yer sağlar. Bir basınç sensörü ve ultrasonik sensörleri sürekli olarak BionicFinWave’in duvarlara olan uzaklığını ve sudaki derinliğini kaydetmek suretiyle hortum sistemiyle çarpışmaları engeller. Bu bağımsız ve güvenli gezinme, uygun yazılım aracılığı koordine edilebilecek ve düzenlenebilecek kompakt, verimli ve su geçirmez veya suya dayanıklı komponentlerin geliştirilmesini gerektirmiştir.