Pnömatik robot teknolojisiyle yapay zekayı bir araya getiren Festo, "Geleceğin Konseptleri"nden biri olan insan-robot işbirliğine uygun, BionicSoftArm ve BionicSoftHand teknolojilerini geliştirdi.
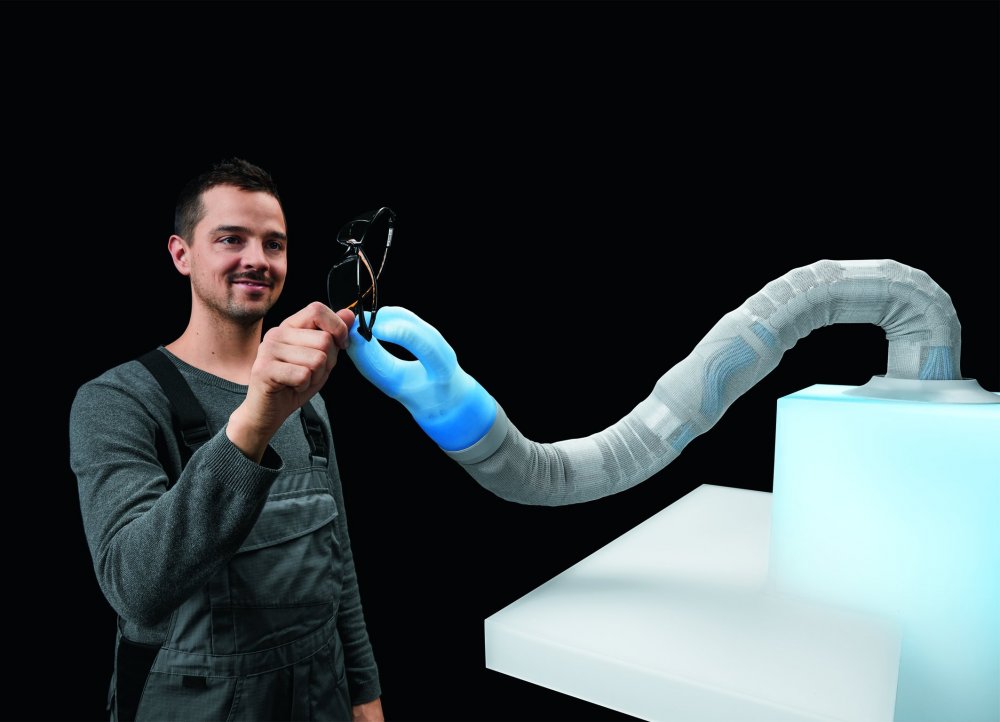
Kavrama, tutma veya çevirme, dokunma, yazı yazma veya sıkıştırma. Günlük hayatta, ellerimizi doğal olarak bunlar gibi çok çeşitli işler için kullanırız. Bu bağlamda, eşsiz güç, yetenek ve ince motor becerileriyle insan eli doğanın gerçek bir mucizesidir. Ortak çalışmaya dayalı çalışma alanlarında robotları doğanın bu modelinden esinlenen, yapay zeka yoluyla öğrenerek çeşitli görevleri çözen bir tutucuyla donatmaktan daha doğal ne olabilirdi? BionicSoftArm pnömatik hafif robotla birlikte, "Geleceğin Konseptleri" insan-robot işbirliği için uygundur.
BionicSoftHand pnömatik olarak çalışır, böylece insanlarla güvenli şekilde ve doğrudan etkileşim halinde olabilir. İnsan elinden farklı olarak, BionicSoftHand’in kemikleri yoktur. Parmakları, hava bölmelerine sahip esnek körüklü yapılardan oluşur.
Körükler, parmaklar içerisinde esnek ve yüksek mukavemetli ipliklerle örülmüş özel bir 3D dokuma kumaş astar ile sarılmıştır. Dokuma kumaşın yardımıyla, yapının tam olarak nereye kadar genişlediğini ve güç ürettiğini ve genişlemesinin engellendiği yeri belirlemek mümkündür. Bu sayede hafif, esnek, uyarlanabilir ve hassas olmakla birlikte güçlü kuvvetler uygulama yeteneğine sahiptir.

YAPAY ZEKA ALGORİTMALARIYLA YARATILIYOR
Makinaların öğrenme yöntemleri insanlarınkiyle karşılaştırılabilir: Pozitif veya negatif bir şekilde sınıflandırma yaparak bunlardan öğrenmeleri için eylemlerinin ardından bir geri bildirime ihtiyaç duyarlar.
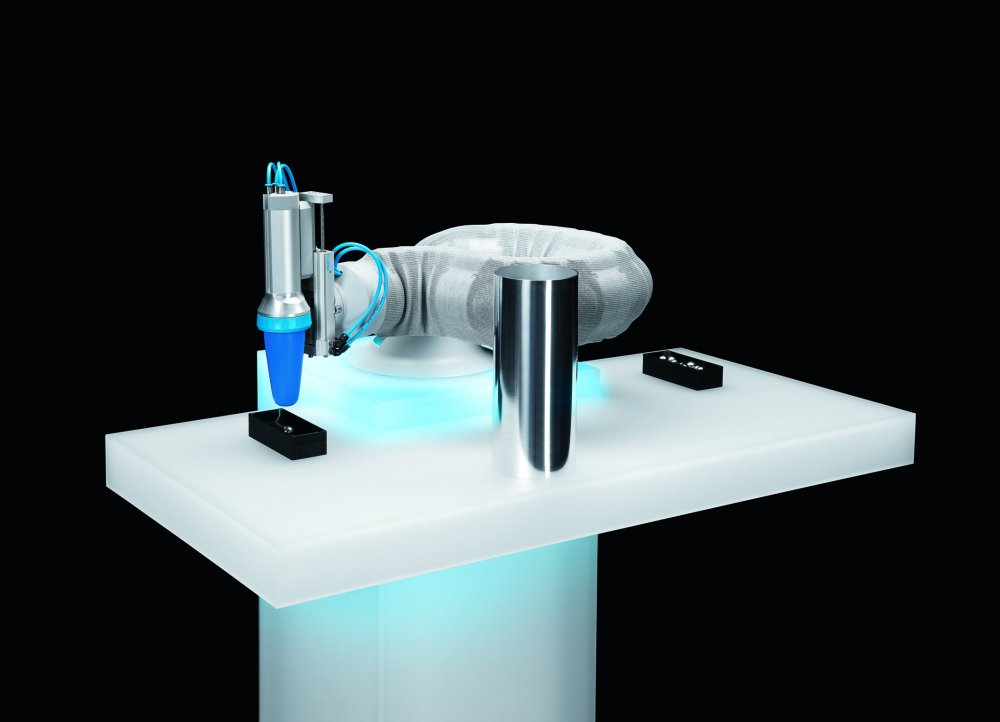
BionicSoftHand, takviyeli öğrenme yöntemini kullanmaktadır. Bunun anlamı şudur: Belirli bir eylemi taklit etmek yerine, ele sadece bir hedef verilir. El, bu hedefi gerçekleştirmek için deneme-yanılma yöntemini kullanır. Alınan geri bildirim temelinde, görev başarılı şekilde yerine getrilinceye kadar eylemlerini kademeli olarak optimize eder.
Özellikle, BionicSoftHand sonunda daha önce tanımlanmış bir kenarın yukarıya doğru yönelmesi için bir 12-kenarlı “küp” dönüş hareketi yapmalıdır. Gereken hareket stratejisi, bilgisayar görüntüsü üzerinden derinlik algılayan bir kameradan alınan veri ve yapay zeka algoritmaları sayesinde yaratılan bir dijital çift yardımıyla bir sanal ortamda öğretilir.
BIONICSOFTHAND: HASSAS KONTROL İÇİN ORANSAL PİEZO VALFLER
Geliştiriciler, BionicSoftHand’in hortum sistemi işçiliğini mümkün olduğu kadar düşük tutmak için, özel olarak doğrudan el üzerine monte edilen küçük, dijital olarak kontrol edilen bir valf adası tasarladılar. Yani, tutucu parmakları kontrol etmek için kullanılan hortumların tüm robot kol boyunca çekilmesi gerekmez.
Böylece, BionicSoftHand besleme havası ve egzoz havası için sadece bir hortumla hızlı ve kolay bir şekilde bağlanıp çalıştırılabilir. Kullanılan piezo valflerle, parmakların hareketleri hassas bir şekilde kontrol edilebilir. 24 adet valf nozulu bir hava akımı levhası yoluyla tutucu parmakların on adet hava bağlantısına ve iki adet açısal döner silindire bağlanmıştır. Aynı zamanda, hassas kontrol için gereken basınç sensörleri levhanın üzerinde yer alır.
Böyle bir dar alanda karmaşık hava kanallarıyla filigran tasarımını gerçekleştirebilmek için, levha 3D yazdırma ile üretilir.
BIONICSOFTARM: BİR ROBOT KOL, OLASI PEK ÇOK VERSİYON
Fabrika işçisinin bedensel işi ile robotun otomatik eylemleri arasındaki katı ayrım giderek ortadan kalkıyor. İş tanımları birbirine geçiyor ve birleşerek ortak çalışmaya dayalı bir çalışma alanı haline geliyor. Bu şekilde, insan ve makina gelecekte aynı iş parçası veya komponent üzerinde eşzamanlı olarak güvenlik nedenleriyle birbirinden korunmak zorunda kalmaksızın birlikte çalışabilecek.
BionicSoftArm, uygulama alanları önemli derecede genişlemiş Festo BionicMotionRobot’un daha da geliştirilmiş kompakt halidir. Bu, modüler tasarım sayesinde mümkün olmuştur. Yedi adet pnömatik körük parçası ve döner silindirle birleştirilebilir.
Bu, uzanım ve mobilite bakımından maksimum esnekliği garanti eder ve böylece gerektiğinde en dar yerlerde bile engellerin etrafında çalışmasını mümkün kılar. Aynı zamanda, tamamen esnektir ve insanlarla güvenli şekilde çalışabilir. Direkt insan-robot işbirliği, hem BionicSoftArm ile hem de alma ve yerleştirme görevleri gibi klasik SCARA uygualmalarında kullanımında mümkündür.
ESNEK UYGULAMA OLANAKLARI
Modüler robot kol, tasarıma ve monte edilen tutucuya bağlı olarak çok çeşitli uygulamalar için kulanılabilir. BionicSoftArm, esnek kinematiği sayesinde insanlarla doğrudan ve emniyetli şekilde etkileşime girebilir.
Ayrıca, kinematik sistemleri sayesinde üretim ortamlarındaki çeşitli konumlarda farklı görevlere daha kolay uyarlanmaktadır: Kafesler ve ışık bariyerleri gibi maliyetli güvenlik cihazlarının ortadan kaldırılması tamamen uyarlanabilir ve ekonomik üretime uygun şekilde değiştirme sürelerini kısaltmakta, böylece esnek kullanımı mümkün kılmaktadır.